facial deformation transfer
We discuss a scheme by which we can transfer the deformation of a source face to a target face, using a given set of correspondence pair of points. The target face could be of different, geometry, or transformation.
acknowledgement
We would like to thank Lazlo Vespermi of abalone llc for providing us with the source material.
First let us familiarize with some terms.
source mesh
A well defined regular facial mesh, resembling a mannequin’s face.
target mesh

Target mesh is obtained from real people, using commercial computational photography techniques.
neutral state of a mesh
is the un-deformed state of the mesh.
feature points set
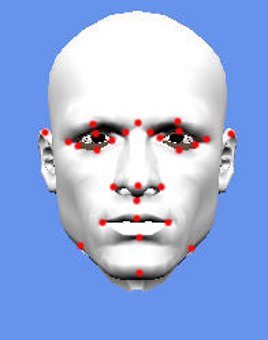
A set of points in the mesh which denote predetermined features. Shown are the 28 feature points in the source mesh. A feature point for a mesh is represented as an index to the triangles of the mesh, and a three tuple bary-centric co-ordinates in the triangle. The feature points are ordered. Eg: 20th feature point is the left end of the lips.
problem specification
The fixed inputs to the system are
* neutral source mesh
* neutral target mesh
* set of 28 feature points for neutral source mesh
* corresponding set of 28 feature points for target neutral mesh
Given the above fixed inputs, for each given deformation of the source mesh, compute the deformation of the target mesh.
results
Shown below is a deformation of the source mesh and a corresponding deformation of the target mesh.


method
We use the same technique of scattered data interpolation, that is described in Marco Fratarcangeli, Marco Schaerf and Robert Forchheimer:Facial Motion Cloning with Radial Basis Functions in MPEG-4 FBA.
Let us talk about the neutral state. Let be the set of 28 feature points for the source mesh. Let be the corresponding set of target feature points.
For any point in the source mesh, will give the corresponding point in the target mesh.
Given two points and , is a radial basis kernel, which evaluates to a scalar, . -s are vectors. By equating with we get a linear set of equations that can be solved to get the unknown -s.
references
acknowledgement
We would like to thank Lazlo Vespermi of abalone llc for providing us with the source material.
blog comments powered by Disqus